
Desafios prostéticos: uma ligação humano-máquina
Num mundo ideal, assim que perdêssemos algum membro do nosso corpo, seria apenas uma questão de tempo até à regeneração completa do mesmo. Como somos mamíferos e não anfíbios ou até répteis, não somos dotados de tal capacidade – pelo menos, não a esse nível. Assim, temos de recorrer a meios artificiais para suprir essa necessidade: as próteses.
Conexão Humano-máquina
A 17 de outubro deste ano, foi publicado no jornal Science Robotics um artigo que descrevia o sucesso de um projeto que já durava há três anos: uma prótese robótica que se fundia aos ossos, músculos e nervos.
Karin, uma senhora sueca de meia-idade perdeu parte do seu antebraço num acidente agrícola há cerca de vinte anos. Após algumas experiências com próteses normais, decidiu dar uma chance a este novo projeto. Esta prótese resume-se a uma mão biónica que cria uma interface humano-máquina. Por outras palavras, uma inteligência artificial traduz os sinais cerebrais em movimentos precisos, mas ainda simples. Neste protótipo, a sensibilidade ainda é limitada, mas Karin já consegue mover os seus dedos individualmente com sucesso em 95% das vezes. Hoje, é capaz de fazer muitas mais atividades, para nós corriqueiras.
Até há não muito tempo, todas as mãos robóticas lidavam com um grande problema: o posicionamento dos elétrodos. Os elétrodos são polos condutores de corrente elétrica que podem consumir ou gerar energia elétrica, sendo, portanto, um dos elementos responsáveis pela comunicação entre humano e máquina. Desde os anos 60 que estes elétrodos eram apenas colocados na mão robótica, o que limitava a quantidade e qualidade dos sinais sensoriais. Assim, por consequência, isto acabava por restringir também o controlo da mão.
O investigador Ortiz Catalán e a sua equipa, do Bionics Institute, na Austrália, decidiram ir por outra abordagem e construíram esta mão biónica que se funde ao corpo através da osteointegração. As células do osso tendem a crescer agarradas à volta do implante artificial e isto permite uma melhor integração da prótese.
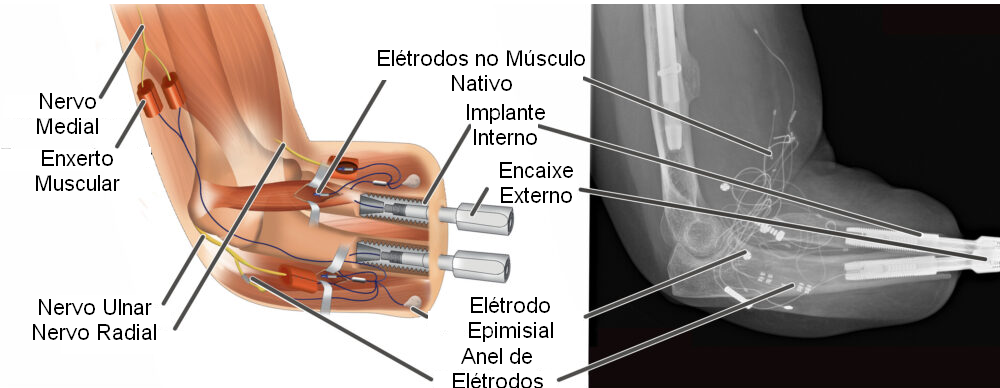
Neste caso, dois implantes internos fundem-se com os ossos ulna e rádio – os ossos do antebraço. Ao mesmo tempo, os nervos ulnar e radial, que estimulam os músculos da respetiva região, são divididos nas suas terminações. Agora, estas “pontas” nervosas já não darão diretamente ao músculo, mas sim a enxertos musculares recolhidos do músculo nativo do antebraço. Estes enxertos, por sua vez, tornam-se amplificadores biológicos dos sinais motores prevenientes do cérebro.
Sinais esses que são capturados por elétrodos inseridos – e aqui está a novidade e solução do problema – nestes enxertos. São ainda aplicados elétrodos nos músculos nativos, para extrair sinais adicionais de controlo da próteses. Além disso, os nervos são ainda rodeados por um “anel” destes polos condutores de corrente elétrica, para provocar uma resposta sensorial vinda da prótese. São também colocados estes pequenos componentes na tecido que envolve o músculo do osso, o epimísio.
Resumidamente, para compensar a pequena quantidade de elétrodos externos das antigas próteses, os investigadores do Bionics Institute, optaram por uma grande quantidade de elétrodos internos, para um melhor controlo e precisão.
Diminuição da Rigidez de Movimentos
No entanto, há que notar que os robôs não possuem ossos nem tecidos flexíveis que os conectem. Dispõem apenas de ligações artificiais feitas de materiais sólidos como o metal. Isto faz com que não sejam tão ágeis, flexíveis e macios como o ser humano. O seu movimento é rígido e pouco fluido. Pelo menos, até há pouco tempo.
Investigadores do Instituto de Tecnologia de Zurique (ETH), na Suíça, desenvolveram uma mão robótica, a partir de uma impressora 3D do MIT, com ossos, ligamentos e tendões humanoides. Foi a primeira vez que uma mão robótica foi impressa na totalidade, de uma só vez. “O que normalmente temos de fazer é fundir diferentes materiais numa só estrutura”, afirma Robert Katzschamann, professor do instituto. Aqui, o processo de juntar todas as partes num quebra-cabeça final já não acontece, pois o “puzzle” já vem completo de raiz. Este novo projeto foi divulgado na revista Nature a 15 de novembro deste ano.
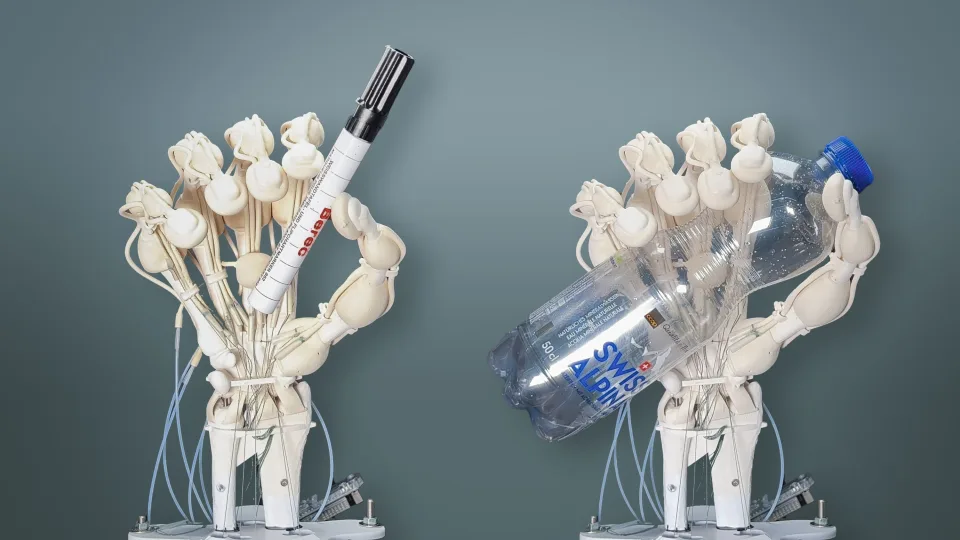
Esta impressora do MIT permite a fabricação de estruturas híbridas de materiais. A equipa, no entanto, adicionou um laser que analisa camada por camada e corrige os possíveis erros no próximo estrato. A mão robótica compõe-se assim de plásticos dobráveis e elásticos e um material mais sólido para os ligamentos. Assim como uma mão humana, esta mão robótica possui então materiais elásticos, macios e rígidos. Materiais fortes o suficiente para agarrar objetos e suaves o suficiente para interagir com humanos. Pesquisadores dizem que um dia este projeto pode ser usado para próteses mais customizadas, que possam até ter uma imitação de um tecido muscular.
Thomas Bucher, também investigador, conta à Reuters que “embora esta mão ainda não possa ser colocada num ser humano e usada adequadamente, isto é um primeiro passo”. O investigador afirma ainda que este novo processo de impressão permite uma “maior rapidez entre a ideia e o protótipo final” . Ou seja, é possível observar com as próprias mãos esse protótipo de uma forma mais veloz, o que ajuda a também tentar entender o que ainda há para melhorar.
A robótica evolui exponencialmente e o ser humano evolui, de certa forma, com ela. A cada dia que passa, as imitações artificiais tornam-se cada vez mais parecidas como produto original. Quem sabe no futuro – talvez um não tão longe da nossa realidade – não nos equiparemos ao universo robótico de ficção científica de Isaac Asimov? Resta-nos esperar. Mas uma coisa é certa: mesmo só com a tecnologia atual, conseguimos ter próteses que facilmente fazem inveja ao Capitão Gancho.
Fonte da capa: Stable Diffusion Software
Artigo revisto por Andreia Batista
AUTORIA

Seria clichê dizer que eu era uma criança irrequieta. Seria clichê e errado, porque nunca fui. O pequeno Bruno gostava de estar no seu canto, sossegado, a descobrir o máximo de coisas possível e a aplicar as aprendizagens para criar o que lhe apetecesse. Hoje em dia, a única coisa que mudou foi a minha altura. Sempre fui um ávido do conhecimento e sempre o espalhei com prazer. Talvez tenha sido por isto que segui Jornalismo e não as outras mil opções que tinha em mente, porque condensa tudo o que mais amo.